What if the greenhouse itself were the robot?
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
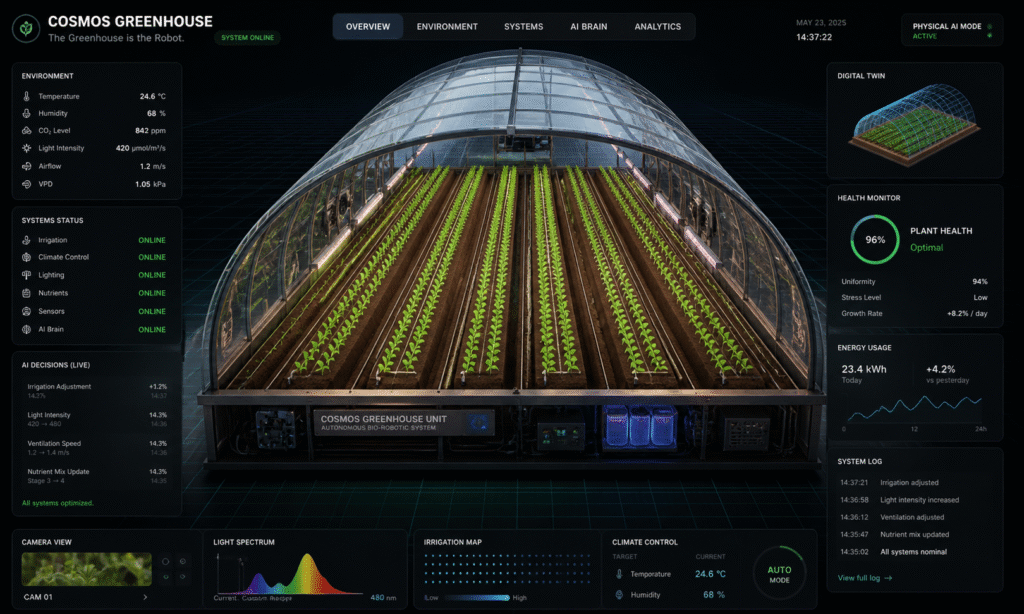
This project is based on a 35 × 50 ft greenhouse model developed in collaboration with an organic farm partner. The system was built using OpenUSD, simulated and validated in NVIDIA Isaac Sim, and integrated with real-time environmental data from on-site sensors. Through an MCP-based connection to the farm’s database, live data streams including temperature, humidity, soil moisture, feed into the system continuously. A Cosmos Transfer model operates as the decision-making layer in the backend, enabling adaptive control of key greenhouse functions such as ventilation (fans and windows), irrigation and air humidity management. The result is a unified digital twin where physical processes and AI-driven decisions are tightly coupled in real time.
The long-term goal of this project is to design a modular, easy-to-replicate greenhouse system that can be deployed by farmers and home owners with minimal technical barriers. The structure follows standardized dimensions and layout patterns, enabling not only scalability but also compatibility with autonomous farming systems. This creates a foundation for training robotic agents capable of transplanting, pruning, harvesting, and post-harvest bed maintenance, significantly reducing the need for continuous human labor. The current model is optimized for leafy greens, peppers, cruciferous vegetables, and root crops such as potatoes, radish, and ginger, while also supporting more complex crops like tomatoes with partial human assistance. The vision is a system where biology, robotics, and AI converge to create a resilient, accessible, and intelligent food production infrastructure.